FCDOutput
The FCD (floating car data) export contains location and speed along with other information for every vehicle in the network at every time step. The output behaves somewhat like a super-accurate high-frequency GPS device for each vehicle. The outputs can be processed further using the TraceExporter tool for adapting frequency, equipment rates, accuracy and data format.
Instantiating within the Simulation#
The simulation generates this output when setting the option --fcd-output <FILE>. <FILE> is the name of the file the output will be written to. Any other file with this name will be overwritten, the destination folder must exist.
By default, fcd-output is enabled for all vehicles and persons in the simulation with output in each simulation step. Using device assignment options or parameters (i.e. --device.fcd.probability 0.25) the set of vehicles which generate fcd output can be reduced. The output period can be set by using option --device.fcd.period <TIME>. To delay output (i.e. until some warm-up time has passed), the option --device.fcd.begin <TIME> may be used.
Generated Output#
The generated XML file looks like this:
<fcd-export>
<timestep time="<TIME_STEP>">
<vehicle id="<VEHICLE_ID>" x="<VEHICLE_POS_X>" y="<VEHICLE_POS_Y>" angle="<VEHICLE_ANGLE>" type="<VEHICLE_TYPE>"
speed="<VEHICLE_SPEED>"/>
... more vehicles ...
</timestep>
... next timestep ...
</fcd-export>
The values without a tick in the "On" column need to be enabled explicitly and the ones without a tick at "Meso" are not available for the mesoscopic simulation.
| Name | Type | On | Meso | Description |
|---|---|---|---|---|
| timestep | (simulation) seconds | x | x | The time step described by the values within this timestep-element |
| id | id | x | x | The id of the vehicle |
| x | m or longitude | x | x | The absolute X coordinate of the vehicle (center of front bumper). The value depends on the given geographic projection. With the option --fcd-output.utm, the value is given in UTM coordinates, taking the network offset into account. If the network has no TUM projection (check the line containing "location netOffset" in the network file), you need to reprojected it, e.g. using netconvert. With the option --fcd-output.geo, the longitude is given (WGS84). |
| y | m or latitude | x | x | The absolute Y coordinate of the vehicle (center of front bumper). The value depends on the given geographic projection. With the option --fcd-output.utm, the value is given in UTM coordinates, taking the network offset into account (see the info above regarding the projection issue). With the option --fcd-output.geo, the lattitude is given (WGS84). |
| z | m | (x) | x | The z value of the vehicle (center of front bumper). Note: This value is only present if the network contains elevation data |
| angle | degree | x | x | The angle of the vehicle in navigational standard (0-360 degrees, going clockwise with 0 at the 12'o clock position) |
| type | id | x | x | The name of the vehicle type |
| speed | m/s | x | x | The speed of the vehicle |
| speedVec | m/s | x | x | The speed vector of the vehicle:speed_x,speed_y |
| pos | m | x | x | The running position of the vehicle measured from the start of the current lane. |
| lane | id | (x) | The id of the current lane (only available in microsimulation). | |
| edge | id | (x) | x | The id of the current edge (only available in meso). |
| slope | degree | x | x | The slope of the vehicle in degrees (equals the slope of the road at the current position) |
| signals | bitset | The signal state information (blinkers, etc) | ||
| acceleration | m/s2</sup | The longitudinal acceleration | ||
| accelerationLat | m/s2</sup | The lateral acceleration (only with enabled sublane model) | ||
| accelerationVec | m/s2</sup | The acceleration vector of the vehicle: acceleration_x,acceleration_y | ||
| distance | m | x | The kilometrage / mileage position of the vehicle. | |
| odometer | m | x | The odometer value (distance driven since departure). | |
| vehicle | id | x | The id of the vehicle the person is currently riding (only available for persons) | |
| posLat | m | The lateral position on the lane | ||
| speedLat | m/s | The lateral speed (negative if the vehicle moves to the right) | ||
| leaderID | id | The id of the leading vehicle | ||
| leaderSpeed | m/s | The speed of the leader | ||
| leaderGap | m | The gap to the leader | ||
| segment | m | x | The segment index within the current edge | |
| queue | m | x | The queue index within the current edge | |
| entryTime | m | x | The time at which the vehicle entered the current segment | |
| eventTime | m | x | The earliest time at which the vehicle can leave the current segment | |
| blockTime | m | x | The time at which the vehicle was blocked from leaving the current segment (or -1 if not blocked) | |
| tag | string | Whether a vehicle, container or person is being written (mainly useful for tabular output) |
Emission Attributes#
All attributes from the emission output can be added to the FCD output as well. They need to be enabled by using the option --fcd-output.attributes, see below.
<configuration>
...
<output>
<fcd-output.attributes value="eclass,CO2,CO,HC,NOx,PMx,fuel,electricity,noise"/>
</output>
...
</configuration>
When the option --fcd-output.geo is set, the written (x,y)-coordinates will be the lon/lat geo-coordinates.
Precision#
By default fcd-output returns location values in meter with a precision of 1cm. (changeable by setting option --precision). If you set option --fcd-output.geo the values are lon,lat as decimal values with a precision of 6 decimal places (changeable by setting option --precision.geo)
Person and Container Output#
Any persons or container in the simulation will cause output of he following form:
<fcd-export>
<timestep time="<TIME_STEP>">
<vehicle .../>
...
<person id="..." x="..." y="..." angle="..." type="..." speed="..." pos="..." edge="..." slope="..."/>
...
<container id="..." x="..." y="..." angle="..." type="..." speed="..." pos="..." edge="..." slope="..."/>
...
</timestep>
... next timestep ...
</fcd-export>
If persons or containers are transported within a vehicle, their
respective <person> and <container> elements will be written as child elements of that
vehicle.
Person and container output can be written to a separate file using the option --person-fcd-output. If this option is given, the specified file will only contain containers and persons while the fcd-output will contain only vehicles.
Filtering / Restricting Output#
Caution
The generated output files can become quite large. To write gzipped output files, simply name the output file with an .gz extension. You can also write CSV or Parquet output.
Restricting the set of vehicles that generate output#
Output can be restricted to specific vehicle types or vehicle ids by controlling the set of vehicles that are equipped with the fcd-device. The following example restricts output to a single vehicle called ego:
--device.fcd.explicit ego
The following example restricts fcd-output to a single flow out of the whole simulation
--device.fcd.probability 0 ...
<flow ...>
<param key="has.fcd.device" value="true"/>
</flow>
Restricting the set of persons and containers that generate output#
Output can be restricted to specific person or container types or person/container ids by controlling the set of persons that are equipped with the fcd-(person)-device. The following example restricts output to a single person called ego:
--person-device.fcd.explicit ego
The following example restricts fcd-output to a single personFlow out of the whole simulation
--person-device.fcd.probability 0 ...
<personFlow ...>
<param key="has.fcd.device" value="true"/>
</personFlow>
Restricting the locations#
Output can be restricted to a specific set of edges by loading a list of edges from a file with option --fcd-output.filter-edges.input-file <FILE>. The file format for this is the same as the one when saving selections in netedit:
edge:id1
edge:id2
...
Restricting the locations by shape#
Output can be restricted to vehicles within a specified area by setting a list of <poly> ids with option --fcd-output.filter-shapes.
The polygon shapes must have been loaded from an additional file.
Restricting output by sensor range#
When not all vehicles are equipped with an fcd-device, other vehicles and persons in a radius around the equipped vehicles can be included in the output by setting option --device.fcd.radius to the desired range in m.
Changing the written attributes#
The option --fcd-output.attributes ATTR1,ATTR2,... restricts / extends the written attributes to the given list to customize output (can be any combination of the attributes above). By default all the values with a marker in the "on" column are written. The value all enables all attributes (including emission output). There are also some predefined attribute sets: - location refers to all location attributes enabled by default - emissions all direct emission values (CO, CO2 etc.) - misc all values in the table above which are not selected by default (and not in the emission output)
Further Options#
- --fcd-output.geo will toggle output coordinates to WGS84 (for geo-referenced networks)
- --fcd-output.signals will add signal state information to the output
- --fcd-output.distance will add kilometrage information to the output
- --fcd-output.acceleration will add acceleration data to the output (also lateral acceleration when using the sublane model)
- --fcd-output.max-leader-distance FLOAT will add attributes leaderGap, leaderSpeed, leaderID whenever a vehicle has a leader within the given distance. Otherwise, leaderID will be "" and leaderGap, leaderSpeed will be -1.
- --fcd-output.params KEY1,KEY2,... adds generic parameters to the output (supports device and car-following model parameters as well as arbitrary user-define values)
NOTES#
In combination with the given geometry of the vehicles (shapes) you can build some nice animations, e.g NASA WorldWind or Google Earth.
Visualization example#
Accelerations versus distances#
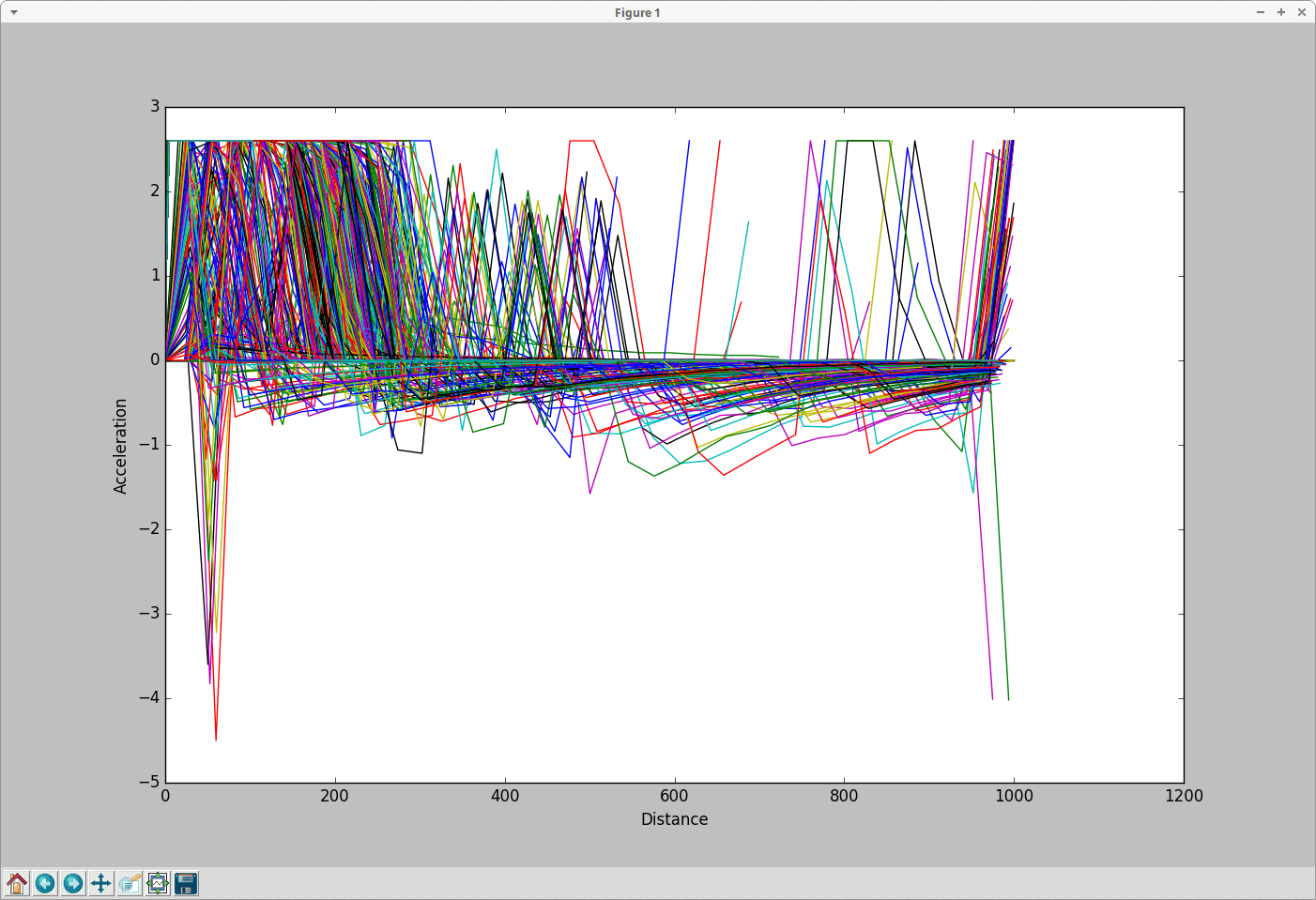
Generated with plot_trajectories.py.
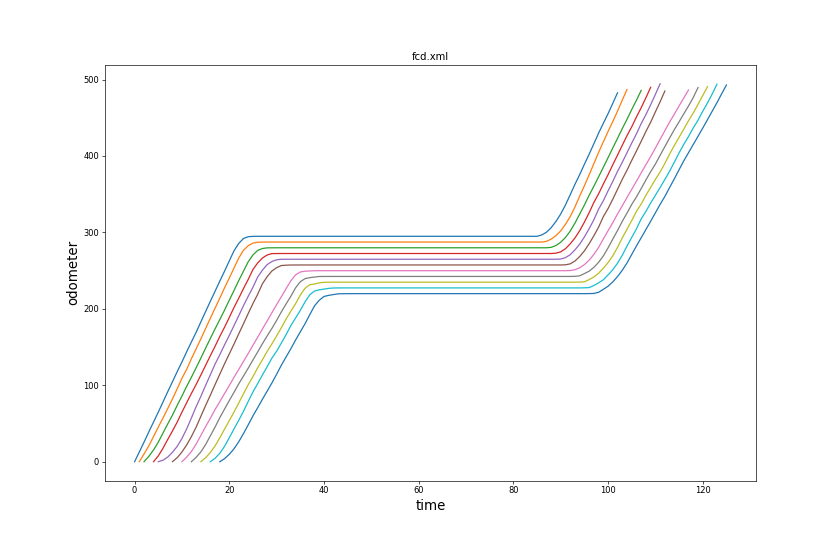
All trajectories over time#
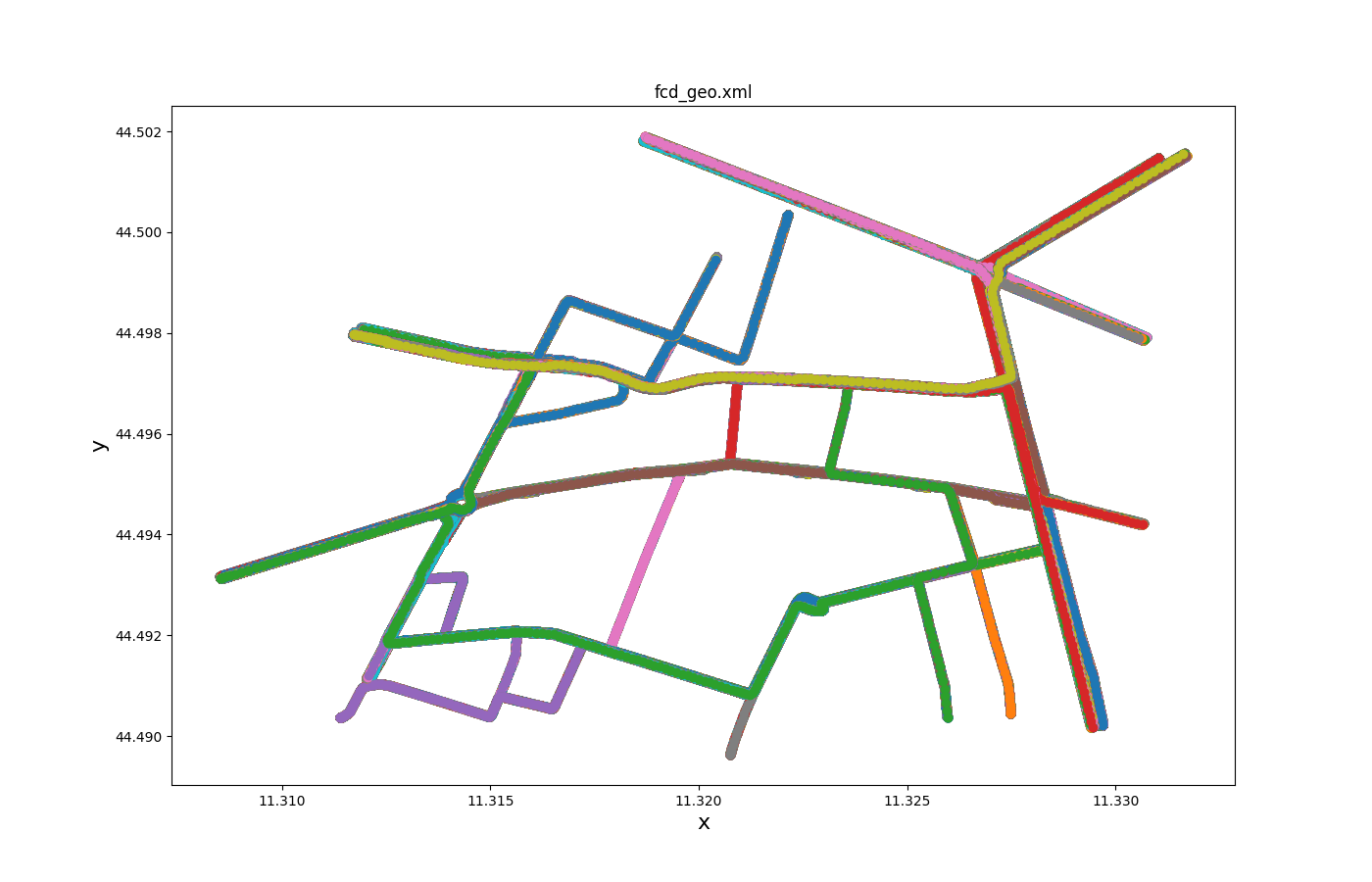
Generated with plotXMLAttributes.py.
Generated with plot_trajectories.py.
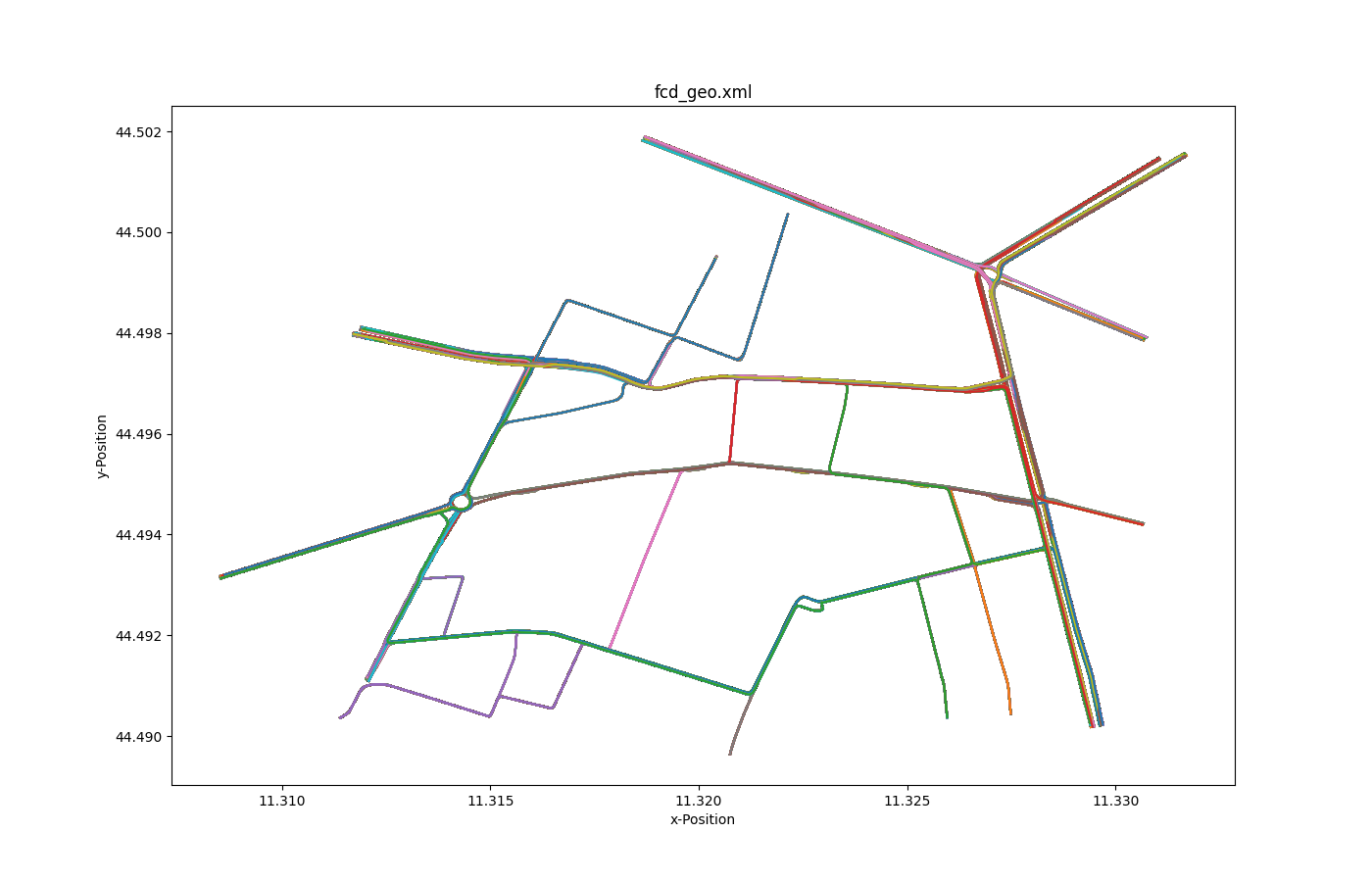
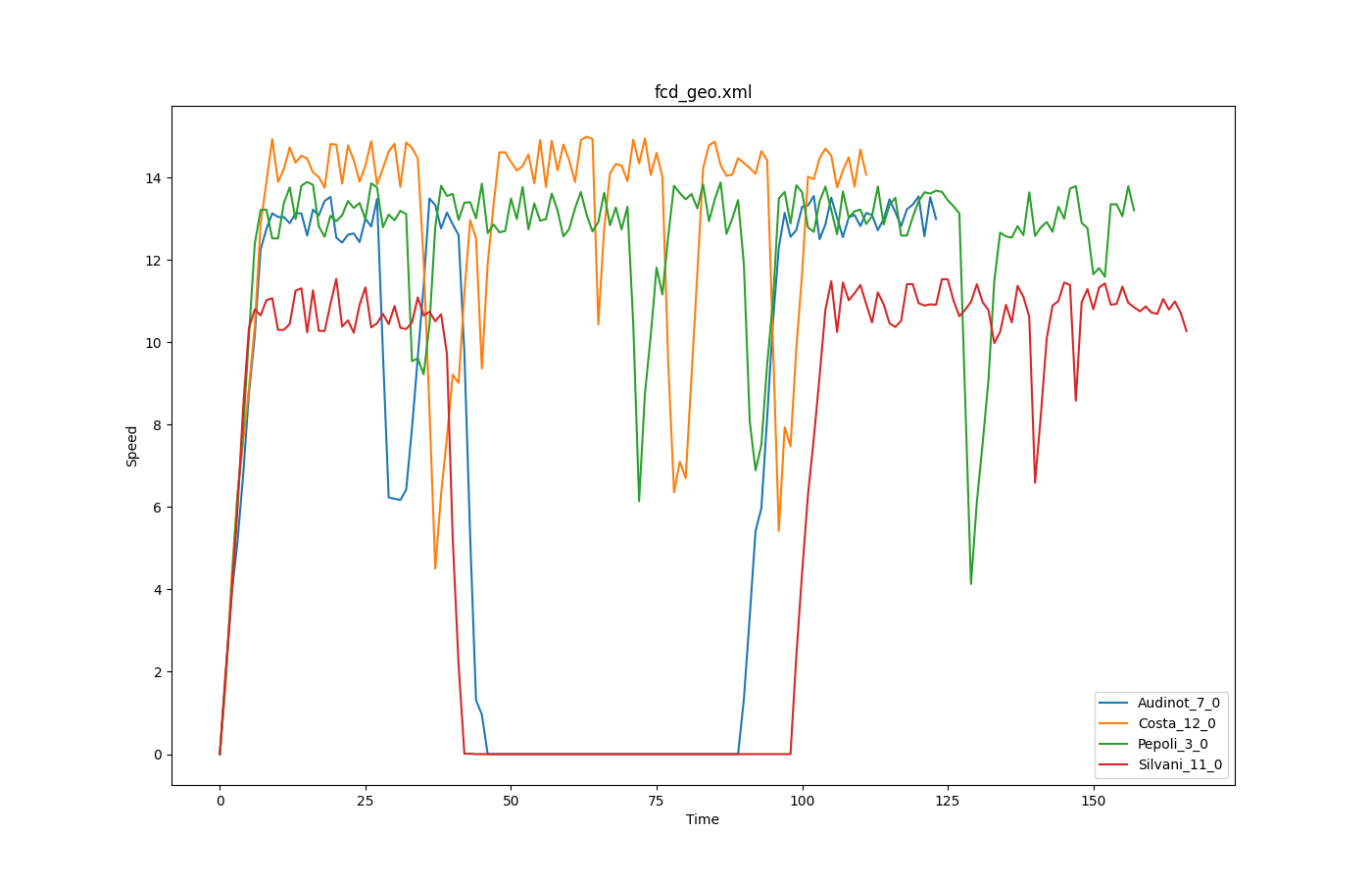
Selected trajectories over time#
Generated with plotXMLAttributes.py.
Generated with plot_trajectories.py.
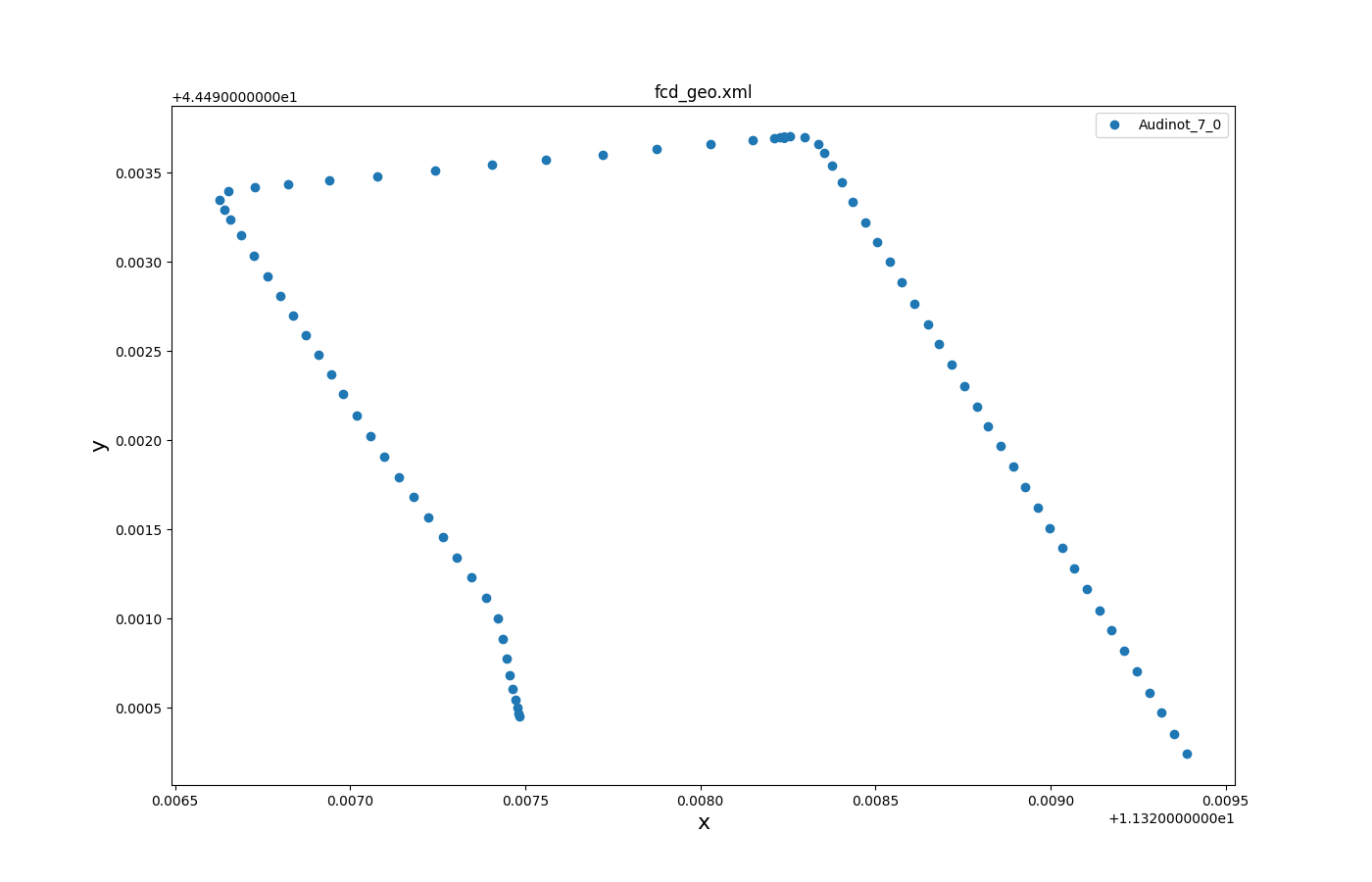
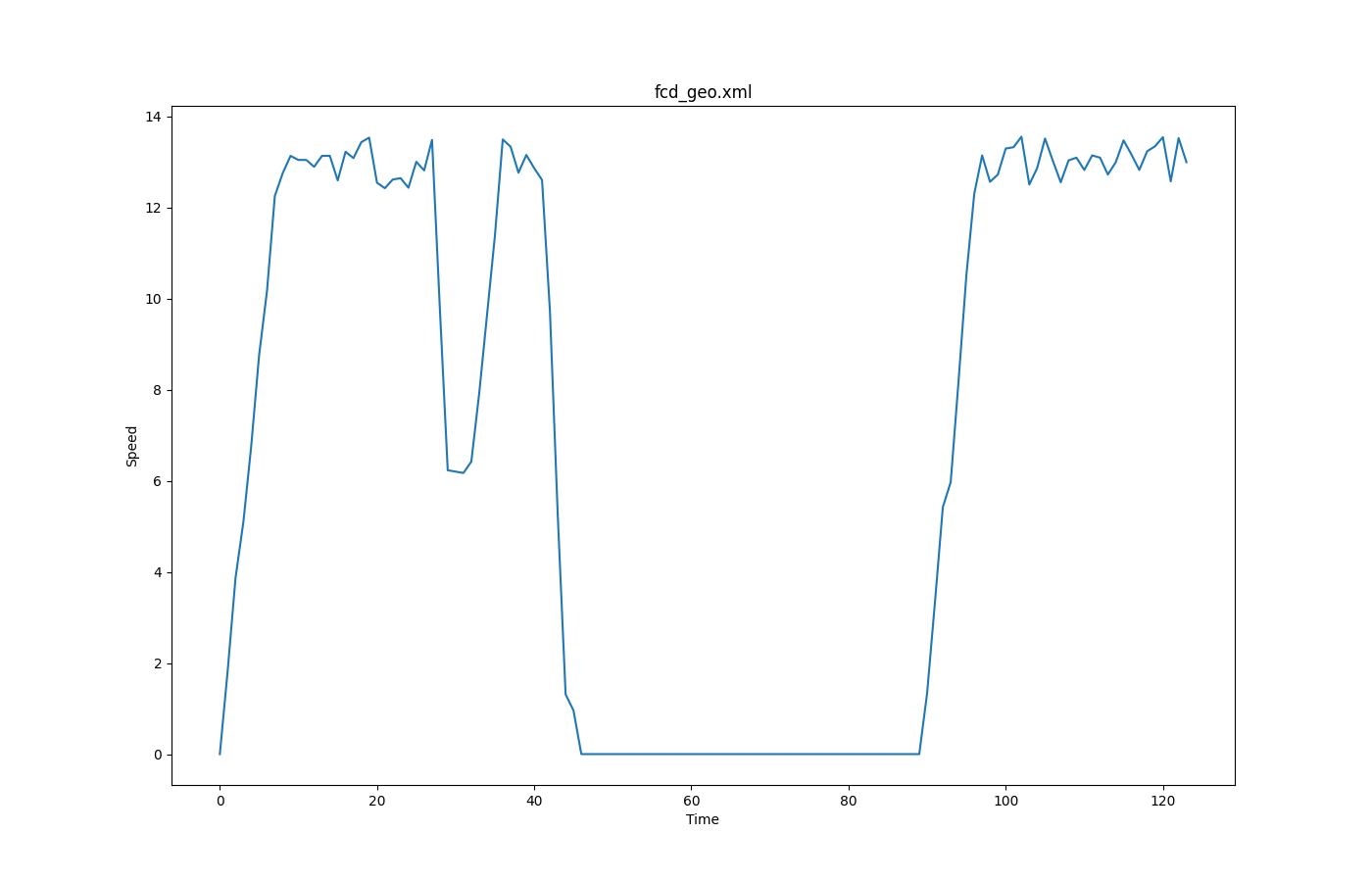
FCD based speeds over time#
Generated with plot_trajectories.py.
Time-Space-Plot#
Generated with plotXMLAttributes.py.