Lanechange
The lanechange-output tracks all events where a vehicle changes laterally from one lane to another (define as the moment where the center line of the vehicle enters the new lane). It also contains the dominant reason for that change maneuver.
Instantiating within the Simulation#
The simulation is forced to generate this output using the option --lanechange-output <FILE>. <FILE> is the name of the file the output will be written to. Any other file with this name will be overwritten, the destination folder must exist.
Generated Output#
The generated XML file looks like this:
<lanechanges>
<change id="<VEHICLE_ID>" time="<TIME_STAMP>" from="<SOURCE_LANE>" to="<DESTINATION_LANE>" reason="<CHANGE_REASON>" ... />
...
</lanechanges>
| Name | Type | Description |
|---|---|---|
| id | id | The id of the vehicle |
| type | id | The type id of the vehicle |
| time | seconds | The time at which the change took place |
| from | id | The id of the source lane |
| to | id | The id of the destination lane |
| pos | float m | The position where the lane-change took place (offset from lane start) |
| reason | string | The reason for changing (see below) |
| dir | int | The direction of the change (difference in lane indices when staying within one edge) |
| speed | double | The current speed of the vehicle |
| leaderGap | double | The longitudinal gap to the nearest leader on the target lane (bumper to bumper) or 'None' if there was no leader. |
| leaderSecureGap | double | The required longitudinal gap to the nearest leader to fulfill deceleration constraints or 'None' if there was no leader. |
| followerGap | double | The longitudinal gap to the nearest follower on the target lane (bumper to bumper) or 'None' if there was no follower. |
| followerSecureGap | double | The required longitudinal gap to the nearest follower to fulfill deceleration constraints or 'None' if there was no follower. |
| origLeaderGap | double | The longitudinal gap to the nearest leader on the vehicle's original lane (bumper to bumper) or 'None' if there was no leader. |
| origLeaderSecureGap | double | The required longitudinal gap to the nearest leader to fulfill deceleration constraints or 'None' if there was no leader. |
| latGap | double | The lateral gap to the nearest neighbor on the target lane or 'None' if there was no neighbor. (only when using the sublane-model) |
Lane Changing Reasons#
The reason may be one of
- speedGain
- strategic
- cooperative
- keepRight
- sublane
- traci
A reason may be further qualified by the addition of the string |urgent.
If a vehicle has the generic parameter "lcReason", that value will be added to the 'reason' attribute in the output. This can be used to further qualify the change reason when influencing vehicles via TraCI.
Continuous Lane Changes#
If the simulation is performed with the sublane-model, the options --lanechange-output.ended and --lanechange-output.started can be used to obtain additional output elements:
<lanechanges>
<changeStarted id="<VEHICLE_ID>" time="<TIME_STAMP>" from="<SOURCE_LANE>" to="<DESTINATION_LANE>" reason="<CHANGE_REASON>" ... />
<change id="<VEHICLE_ID>" time="<TIME_STAMP>" from="<SOURCE_LANE>" to="<DESTINATION_LANE>" reason="<CHANGE_REASON>" ... />
<changeEnded id="<VEHICLE_ID>" time="<TIME_STAMP>" from="<SOURCE_LANE>" to="<DESTINATION_LANE>" reason="<CHANGE_REASON>" ... />
...
</lanechanges>
- A
changeStarted-element is recorded when the vehicle starts to perform lateral movements for reasons other than sublane. - A
change-element is recorded when the primary lane of the vehicle has changed (the center of its front bumper crossed the border between original and target lane). - A
changeEnded-element is recorded when the lateral movement of the vehicle completes the planned maneuver distance and the lateral movement is for a reason other than sublane.
In case of activating the option --lanechange.duration, the change-elements of the output report the gaps recorded at the initialization of the corresponding lanechange.
Visualization example#
Leader gaps versus speeds#
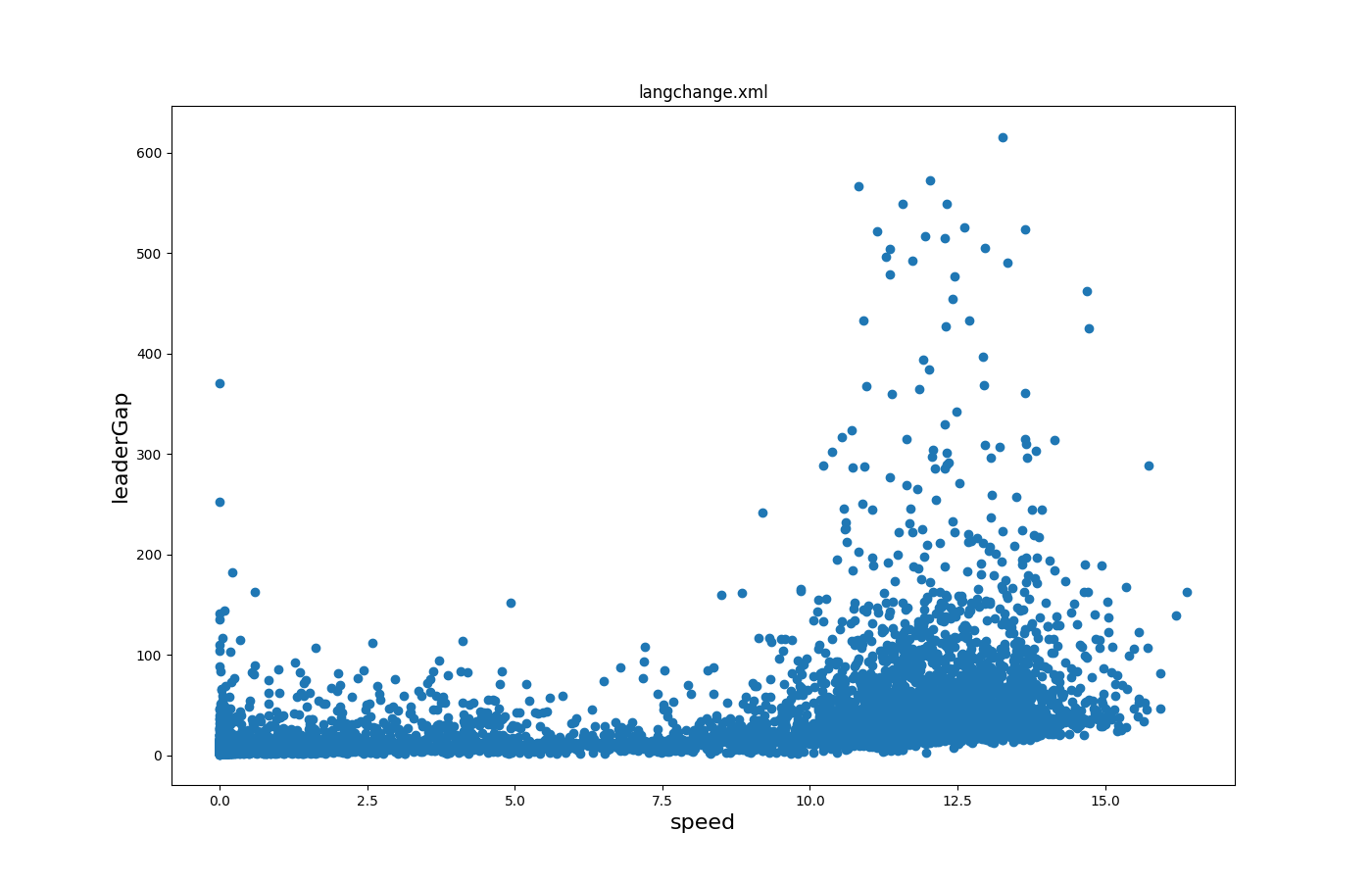
Generated with plotXMLAttributes.py.